Source
Rhizomatiks Research
The original Research page contains the abstract, background, system architecture, making timeline, references, and credits. This page paraphrases and reorganizes that material.
A research and development project for visualizing the trajectory of fencing sword tips in AR. The system evolved from marker-based motion capture into markerless, deep-learning-based 3D tracking. This FIL Design page reorganizes the long Rhizomatiks Research record into a case study on sports broadcast, machine learning, and real-time visualization.
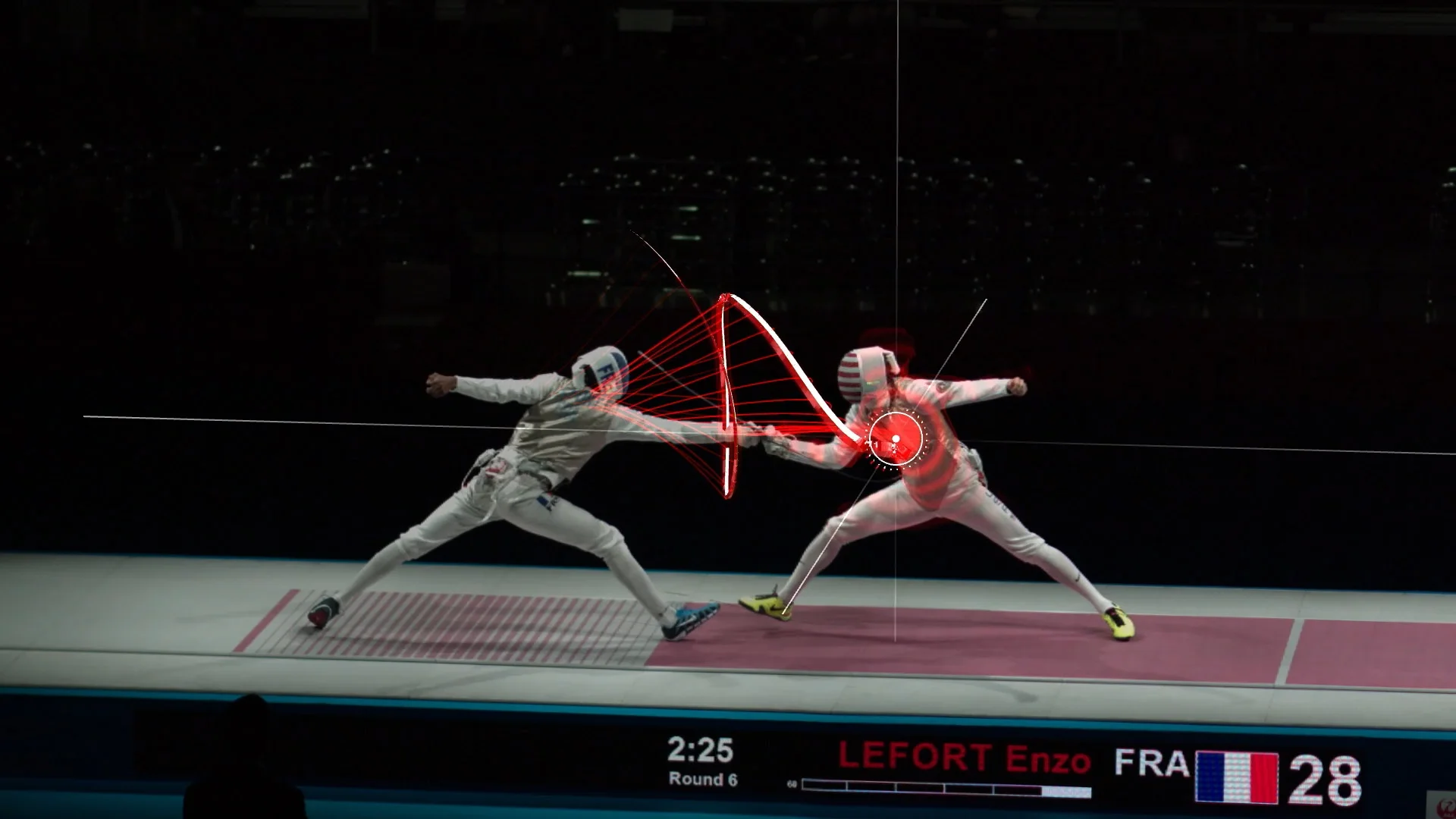
Fencing is historically familiar, but the speed of the sword tip and the split-second exchange are difficult for viewers to read. This project overlays sword-tip trajectories, angles, guard position, and pose estimation onto broadcast imagery, translating otherwise invisible competition data into a visual AR layer.
The original Research page contains the abstract, background, system architecture, making timeline, references, and credits. This page paraphrases and reorganizes that material.
The image files used by the source page were downloaded locally and converted to lightweight WebP assets. YouTube videos are preserved as embeds, matching the source page behavior.
In 2013, as Yuki Ota and Dentsu explored how technology could update sports viewing, Rhizomatiks proposed visualizing the path of the sword tip and implemented the prototype. The project built on earlier Rhizomatiks AR work using motion capture, high-speed cameras, custom markers, and software to track fast body movement.
Fencing is widely recognized and historically established, but its rules and split-second exchanges are difficult for viewers to read. The project began by treating the sword tip itself as a visual information layer.
Around 2012, Daito Manabe and Motoi Ishibashi were already developing AR projects that tracked fast dancer movement and composited graphics onto that motion.
The team confirmed that a small marker on the sword tip could be tracked with high-speed cameras, connecting the Tokyo 2020 bid-era visualization work to later markerless R&D.
Early versions attached reflective markers to the sword and captured their position with optical motion capture. To reduce the burden on athletes and equipment, the project then shifted toward markerless tracking from camera images alone.
Between 2013 and 2014, the team tested sword-tip tracking and real-time AR visualization using reflective markers and motion capture.

Because the sword tip appears as only a few pixels in 4K footage and moves quickly while the blade bends, the team built a multi-stage object recognition network based on YOLO v3.

The 2019 system integrated detections from 24 4K cameras covering both sides of the piste, estimating 3D sword-tip position, angle, and guard position.

For the H.I.H. Prince Takamado Trophy JAL Presents Fencing World Cup 2019, the project became an operational system combining multi-camera capture, image recognition, pose estimation, and AR visualization. Both desktop and mobile diagrams from the source page are preserved as optimized local assets.

The project was not a one-off demo. Each year tested a different technical assumption and moved closer to live competition conditions. The original making section is reframed here as an implementation timeline.
Real-time tracking and AR display were implemented with a marker-equipped sword and tested in a demonstration match.
Simple image processing and corner detection were tested for image-only tip tracking, but precision remained insufficient.
Mock-match footage was captured and a YOLO v2 cascade prototype was tested, revealing dataset and precision limits.
A one-camera 2D tip detection demo succeeded in the center of the piste and was shown at the 71st All Japan Fencing Championships.
A new dataset was captured in Numazu with 8 cameras, 12 athletes, multiple backgrounds and lighting conditions, and more than 200,000 annotated images.
More than 1,000,000 CG images were also used for augmentation, enabling real-match 3D tracking and pose estimation.
A miniature validation set was built in the studio to develop the 3D estimation algorithm and real-time system, confirming real-time 3D sword-tip estimation from image data alone.
The system moved to higher-precision, full-piste tracking and integrated fencing-specific constraints with 3D pose estimation, substantially updating the visualization layer.
Documentation from the 2019 All Japan Fencing Championship, World Cup deployment, and dataset shooting environment is grouped here for comparison. Every image shown below is a locally downloaded and optimized file.




YouTube videos embedded on the original page are preserved here as playable embeds instead of being reduced to outbound links. The video files remain hosted on YouTube, while this page localizes and optimizes the still image assets.
By 2019, the system was detecting not only sword-tip position but also the angle of the tip, guard position and angle, blade shape, and athlete pose. It became more than a visual effect: it translated competitive structure into data that spectators could read.
The source page references the YOLOv3 and YOLO9000 papers, positioning object detection as the basis of sword-tip recognition.
Real footage and CG data were combined so that the system could learn the thin, fast-moving sword tip under multiple conditions.
The AR trajectory acts as both visual expression and a guide for understanding the sport, designing a new information layer for broadcast.
The project-specific credits published on Rhizomatiks Research are reorganized below while preserving their yearly deployment structure.
Open the FAQ, glossary, authority, measurement, and AI index pages. Each link now states what it is for.